 Figura 1. Esquema de un circuito de fuerza motriz, comando, control y protección En este artículo se aborda un tema de fundamental importancia de los motores eléctricos trifásicos (MET), tanto sea por la preservación como para el funcionamiento de estos y del equipo al cual están acoplados. Existe una asociación muy estrecha entre el control y la protección. El sistema de control se hace de acuerdo a la funcionalidad del equipo acoplado, y por lo tanto establece las condiciones de funcionamiento, y es ahí donde se definen las características de la protección, lo cual permitirá elegir los elementos necesarios. Figura 1. Esquema de un circuito de fuerza motriz, comando, control y protección En este artículo se aborda un tema de fundamental importancia de los motores eléctricos trifásicos (MET), tanto sea por la preservación como para el funcionamiento de estos y del equipo al cual están acoplados. Existe una asociación muy estrecha entre el control y la protección. El sistema de control se hace de acuerdo a la funcionalidad del equipo acoplado, y por lo tanto establece las condiciones de funcionamiento, y es ahí donde se definen las características de la protección, lo cual permitirá elegir los elementos necesarios.
Introducción
La importancia del tema no solo reside en evitar daños en el MET sino también preservar la funcionalidad del equipo acoplado, fin primordial del empleo de estas máquinas eléctricas. El tipo y grado de sofisticación de las protecciones está ligado no solamente a la vida del MET sino fundamentalmente al servicio que debe prestar el equipo acoplado a él.
Protección
Para que los MET puedan cumplir con las exigencias impuestas por los equipos mecánicos acoplados y no se dañen se los debe conectar, controlar y proteger adecuadamente; para ello son necesarios ciertos dispositivos apropiados. Estos últimos se alojan en un tablero eléctrico alimentado por una canalización eléctrica desde un tablero general o seccional según sea el caso. Desde el tablero eléctrico del MET, parten otras canalizaciones eléctricas tales como: para el propio motor, otras para los distintos elementos de censado (límites de carrera, flotantes, presostatos, termómetro, etcétera) o bien para los elementos de comando y control (pulsadores, interruptores remotos, etcétera).
La figura 1 muestra el esquema de un circuito de fuerza motriz, comando, control y protección de uno de los circuitos más comúnmente utilizado.  Figura 2. Relé de protección Figura 2. Relé de protección
Tipos de protecciones
Los MET requieren dos tipos básicos de protecciones: por cortocircuito (que pueda ocurrir en sus bobinados o en los cables de su alimentación) y por sobrecarga. Se pueden mencionar con otras como: falta de fase, subtensión, sobretensión y puesta a tierra. Para estas últimas protecciones se necesitan ciertos relés especialmente diseñados (figura 2). Para hacer las dos primeras de las protecciones mencionadas, se necesitan: para el caso de cortocircuito, fusibles o guardamotores magnéticos, y para el caso de las sobrecargas, relés de sobrecarga (figura 3), sensores o sondas y guardamotores termomagnéticos (figura 4).
Todos estos dispositivos de protección están necesariamente asociado a los contactores, que son los que realizan las maniobras de conexión y desconexión en forma normal.
Estas relaciones entre los distintos elementos de maniobra y protección se visualizan en los denominados esquemas funcionales, como el que se muestra a la derecha de la figura 1, los cuales se diseñan de acuerdo a la forma en que ha de trabajar el MET, de sus características, exigencias y potencia.
Las distintas utilizaciones que se hacen de los MET exigen diversos esquemas de comando y control para su funcionamiento adecuado.
Protección contra cortocircuitos
Se emplean fusibles o guardamotores magnéticos. En el caso de los primeros, son especialmente construidos y son del tipo ‘aM’. La corriente eléctrica nominal de estos fusibles puede tomarse para MET con rotor en cortocircuito como 3 * IN. En donde ‘IN’ es la corriente nominal o asignada del MET.
El guardamotor magnético cumple la misma función de protección que los fusibles, en cambio, el tipo termomagnético, las de cortocircuito y sobrecarga a la vez.
 Figura 3. Relé de protección por sobrecarga Protección contra sobrecarga Figura 3. Relé de protección por sobrecarga Protección contra sobrecarga
La protección contra sobrecarga se puede realizar mediante:
-
Relés de sobrecarga acoplados a los contactores (figura 3)
-
Guardamotores termomagnéticos (figura 4)
-
Guardamotor magnético con un relé de sobrecarga acoplado
-
Sondas internas del MET
Las sondas son elementos que se montan en los bobinados para censar la temperatura; la variación de sus resistencias es captada por un relé especialmente asociado que da una señal al sistema de control del MET. Esta puede ser de alarma o bien para sacarlo de funcionamiento; generalmente se dan las dos señales.
Funcionamiento de las protecciones
En la figura 5 se han graficado las curvas que representan la actuación de los elementos de protección por sobrecarga y cortocircuito empleados comúnmente para la protección de un MET.
En la figura 5 se muestra la acción combinada de los relés de protección por sobrecarga o térmico (1-0) y por cortocircuito o magnética (0-2) para proteger un MET. La acción combinada de ambos se muestra mediante la zona sombreada.
 Figura 4. Guardamotor termomagnético Para el caso específico de los MET, el gráfico equivalente es el que muestra la figura 5, donde se representan los siguientes parámetros: Figura 4. Guardamotor termomagnético Para el caso específico de los MET, el gráfico equivalente es el que muestra la figura 5, donde se representan los siguientes parámetros:
-
corriente eléctrica nominal (In)
-
corriente de arranque (Iar)
-
tiempo de arranque (Tar)
-
corriente eléctrica de una ligera sobrecarga (Isc) del orden del cinco al diez por ciento (dependiendo del tipo de MET), que es normalmente posible que se establezca
Las acciones combinadas de estas protecciones se pueden dar...
-
cuando la corriente eléctrica de funcionamiento (I1) sobrepase la línea que representa la de posible sobrecarga (Isc) e intercepte la curva de la protección térmica (0-1) en el punto ‘A’, en cuyo caso el relé dará la señal de apertura al contactor, abriendo el circuito en un tiempo T1;
-
si se produjese un cortocircuito la corriente eléctrica (I2), tomaría un valor mucho más alto que la de sobrecarga, tal que la línea que la representa intercepte la curva de la protección magnética (0-2) en el punto ‘B’, con lo cual también dará la correspondiente señal de apertura al contactor, desconectándolo del motor eléctrico en el tiempo T2.

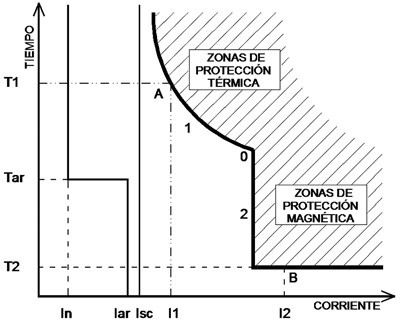 Figura 5. Actuación de los elementos de protección por sobrecarga y cortocircuito Cuando se arranca un MET, este toma una corriente arranque (Iar), que es de cinco a ocho veces la nominal o asignada durante el tiempo de arranque (Tar); en consecuencia, la regulación de los relés de protección debe ser tal que las curvas representativas de esta corriente de arranque (Iar) no intercepte las de las protecciones (1-0-2). Figura 5. Actuación de los elementos de protección por sobrecarga y cortocircuito Cuando se arranca un MET, este toma una corriente arranque (Iar), que es de cinco a ocho veces la nominal o asignada durante el tiempo de arranque (Tar); en consecuencia, la regulación de los relés de protección debe ser tal que las curvas representativas de esta corriente de arranque (Iar) no intercepte las de las protecciones (1-0-2).
Esta es la razón por la cual se emplean las protecciones combinadas, denominadas ‘termomagnéticas’, y más específicamente cuando se trata de MET los guardamotores termomagnéticos, como el que se muestra en la figura 4. La parte de la protección magnética actúa en caso de cortocircuito, mientras que la parte térmica (bimetálica) acciona en caso de una sobrecarga poco pronunciada pero de larga duración, en cambio insensible a una elevación pasajera de la corriente eléctrica.
Tableros para motores eléctricos
El tamaño de los aparatos de maniobra y protección de los MET es proporcional a la potencia eléctrica de estos y a la complejidad de sus circuitos de control, por lo cual es posible encontrar una gran variedad de tamaños.

Figura 6. Tablero eléctrico “casetina” para un solo MET Para un MET de pequeña potencia eléctrica (uno a cinco CV), el comando se puede hacer desde el frente del mismo tablero eléctrico, que tendrá como dimensiones máxima aproximadas unos 0,3 metros de alto por unos 0,15 de ancho, el cual se fija directamente a una pared o columna. A partir de estos valores de potencia y cantidad de MET, las dimensiones irán en aumento. La figura 6 muestra un tablero eléctrico ‘casetina’ para un solo MET. Cuando la cantidad es importante, se recurre a un tipo de tablero eléctrico especialmente diseñado que se denomina “centro de control de motores” y que se identifica con la sigla CCM. La figura 7 muestra uno solo de los compartimentos que componen a estos últimos tableros eléctricos.
Ejemplo de circuito de comando
Para iniciar el tema, se tomará el arranque más simple, que es el directo; para ello se utilizará el esquema de la figura 1, en donde se muestra: a la izquierda, el circuito multifilar de fuerza motriz de un MET, y a la derecha, el circuito unifilar de comando, o sea, su funcional. A continuación se desarrollará la forma secuencial en que operan estos.
Arranque directo
En la figura 1 se muestra la conexión de un MET ‘M’ con arranque en forma directa. En este caso se lo hará mediante la utilización de un interruptor automático del tipo guardamotor ‘Q’ magneto-térmico y un contactor ‘K’.
 Figura 7. Compartimento de un MET en un tablero eléctrico Para iniciar la marcha, es necesario primero, cerrar el interruptor automático ‘Q’ y luego oprimir el pulsador de arranque ‘S2’. Las secuencias y acciones serán las que se describen a continuación a partir de que los contactos principales del contactor K que están normalmente abiertos. Cuando oprimimos el pulsador de arranque ‘S2’ de la botonera, se cierra el circuito auxiliar que alimenta la bobina del contactor ‘K’, la cual atrae su núcleo y cierra sus contactos principales y auxiliares poniendo en marcha el motor. El contacto auxiliar ‘K’ del contactor se cierra manteniendo cerrado el circuito auxiliar, con lo cual los contactos principales del contactor ‘K’ se mantienen cerrados. Si se oprime el botón de parada ‘S1’, se abre este circuito y se desconecta la bobina del contactor ‘K’, con lo cual se abren sus contactos, deteniendo el MET. Figura 7. Compartimento de un MET en un tablero eléctrico Para iniciar la marcha, es necesario primero, cerrar el interruptor automático ‘Q’ y luego oprimir el pulsador de arranque ‘S2’. Las secuencias y acciones serán las que se describen a continuación a partir de que los contactos principales del contactor K que están normalmente abiertos. Cuando oprimimos el pulsador de arranque ‘S2’ de la botonera, se cierra el circuito auxiliar que alimenta la bobina del contactor ‘K’, la cual atrae su núcleo y cierra sus contactos principales y auxiliares poniendo en marcha el motor. El contacto auxiliar ‘K’ del contactor se cierra manteniendo cerrado el circuito auxiliar, con lo cual los contactos principales del contactor ‘K’ se mantienen cerrados. Si se oprime el botón de parada ‘S1’, se abre este circuito y se desconecta la bobina del contactor ‘K’, con lo cual se abren sus contactos, deteniendo el MET.
Si durante la marcha del MET se sucediera una sobrecarga o un cortocircuito, el guardamotor termomagnético lo detecta y abre el contacto ‘F’, produciéndose la misma acción que si se oprimiera el pulsador de parada ‘S1’.
Si la tensión de la red falta, el circuito auxiliar no puede retener a la bobina del contactor ‘K’, con lo cual abre sus contactos principales y auxiliares deteniéndose la marcha.
Se observa que este tipo de comando se puede hacer a distancia mediante el empleo de una caja remota para alojar a los dos pulsadores (‘S1’ y ‘S2’). Estos últimos también pueden instalarse en el mismo gabinete o tablero eléctrico que contiene al guardamotor y al contactor; por ejemplo, como el que se muestra en la figura 5.
 Figura 8. Esquema de un circuito trifilar de un MET con arranque estrella-triángulo En lugar de un guardamotor termomagnético, se podría haber utilizado seccionador, fusibles y un relé de protección por sobrecarga. Figura 8. Esquema de un circuito trifilar de un MET con arranque estrella-triángulo En lugar de un guardamotor termomagnético, se podría haber utilizado seccionador, fusibles y un relé de protección por sobrecarga.
A este circuito se le pueden asociar luces de señalización a los fines de indicar estados del MET como parado, en marcha o que se detuvo por la acción de la protección por sobrecarga.
Arranque estrella-triángulo automático
Este arranque es del tipo a tensión reducida y es el más usado cuando se trata de MET de mayor potencia o cuando se trata de equipos impulsados que tienen un arranque “más pesado”, o sea, los que presentan una inercia mayor.
En las figuras 8 y 9 se muestran el circuito trifilar de fuerza motriz y el funcional de un arrancador estrella-triangulo del tipo automático para un MET con rotor en cortocircuito.
La secuencia es la siguiente: se cierra el interruptor ‘Q’ (tensión de línea) y luego el ‘F5’ (tensión de control), luego se presiona el pulsador ‘S2’ que corresponde a marcha, con lo cual se energizan los contactores ‘K2’ (línea) y ‘K1’ (conexión estrella) y el temporizador ‘KA1’.
La luz de señalización ‘H2’ (indica motor parado) se apaga al abrirse el contacto ‘K2’, y se enciende la ‘H1’ (indica motor en marcha) al cerrarse el contacto ‘K2’. El motor inicia su marcha conectado en estrella.
Luego de transcurrido el tiempo preestablecido en el temporizador, se abre el contacto del mismo ‘KA1’ desconectando el contactor ‘K1’ que mantenía la conexión estrella, cerrando el contacto ‘KA1’, conectando el contactor ‘K3’ correspondiente a la conexión triángulo. Se produjo la conmutación.
 Figura 9. Esquema de un circuito funcional de un MET con arranque estrella-triángulo En caso de producirse una sobrecarga, esta hace actuar el relé de protección ‘F2’, se abre el contacto ‘F2’ con lo cual la marcha del motor eléctrico se detendrá porque se desconectarán los contactores ‘K2’ y ‘K3’, situación indicada por la luz de señalización ‘H3’, que se conecta a través del contacto ‘F2’. Figura 9. Esquema de un circuito funcional de un MET con arranque estrella-triángulo En caso de producirse una sobrecarga, esta hace actuar el relé de protección ‘F2’, se abre el contacto ‘F2’ con lo cual la marcha del motor eléctrico se detendrá porque se desconectarán los contactores ‘K2’ y ‘K3’, situación indicada por la luz de señalización ‘H3’, que se conecta a través del contacto ‘F2’.
Nótese cómo se utilizan otros contactos auxiliares para hacer un enclavamiento de seguridad.
Arranque estrella-triángulo manual
Se trata de la forma más elemental de realizar este tipo de arranque. La secuencia es la misma que en el automático, solo que para realizarla se emplea un interruptor-conmutador manual especialmente fabricado, que se comercializa en el mercado local. La figura 9 muestra el esquema de conexionado. El tiempo de transición entre la conexión estrella a la triángulo se hace observando cómo evoluciona la velocidad del conjunto MET-equipo impulsado.
Bibliografía
-
Editores SRL, Ingeniería Eléctrica, Buenos Aires
-
Sobrevila, Marcelo A., Farina, Alberto L. Instalaciones eléctricas, Rosario, Librería y Editorial Alsina
|

